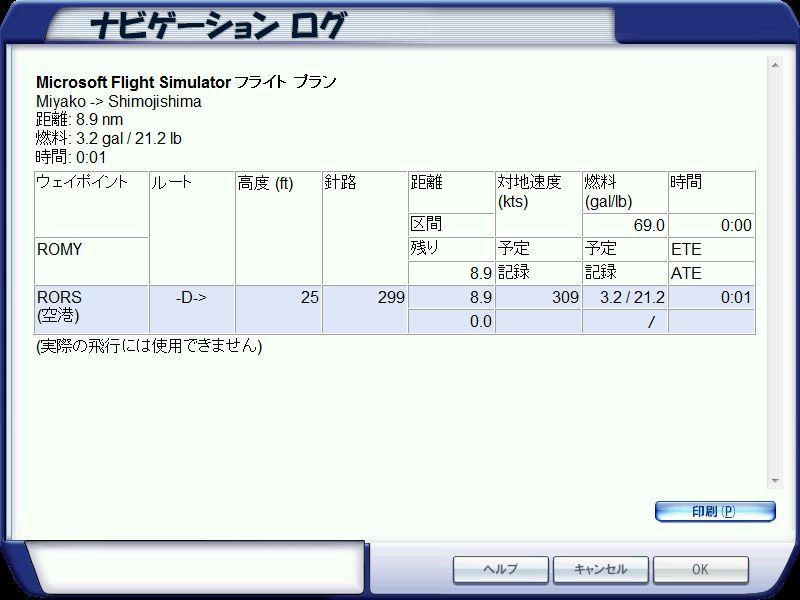
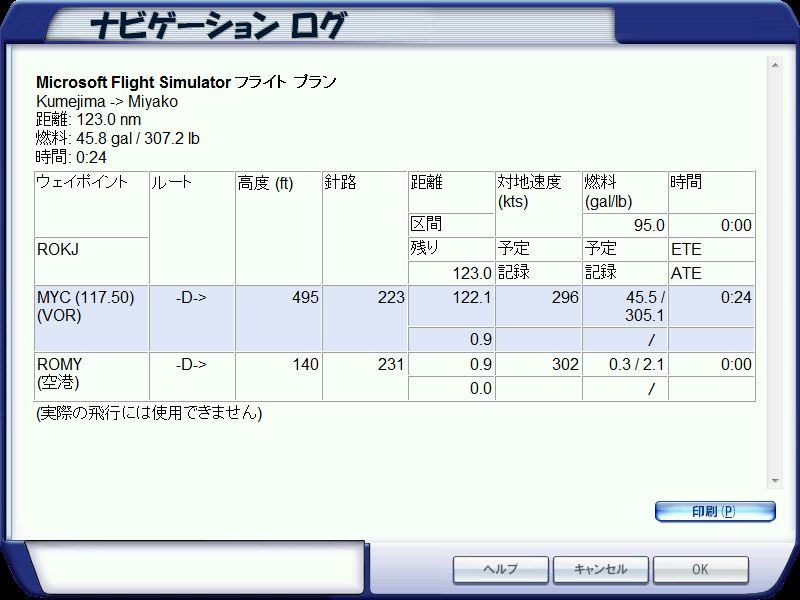
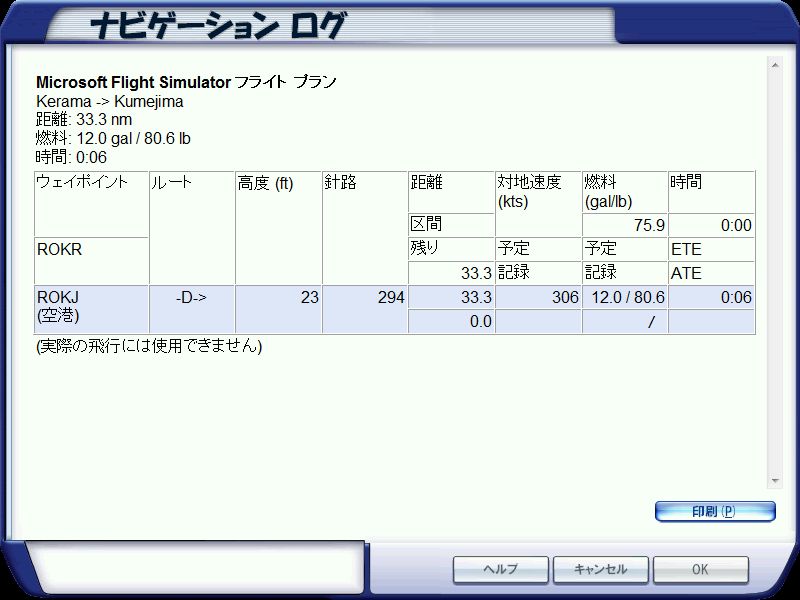
フライトプラン。


滑走路6から離陸。風向き337から風速16ノット。


上昇。

巡航高度。


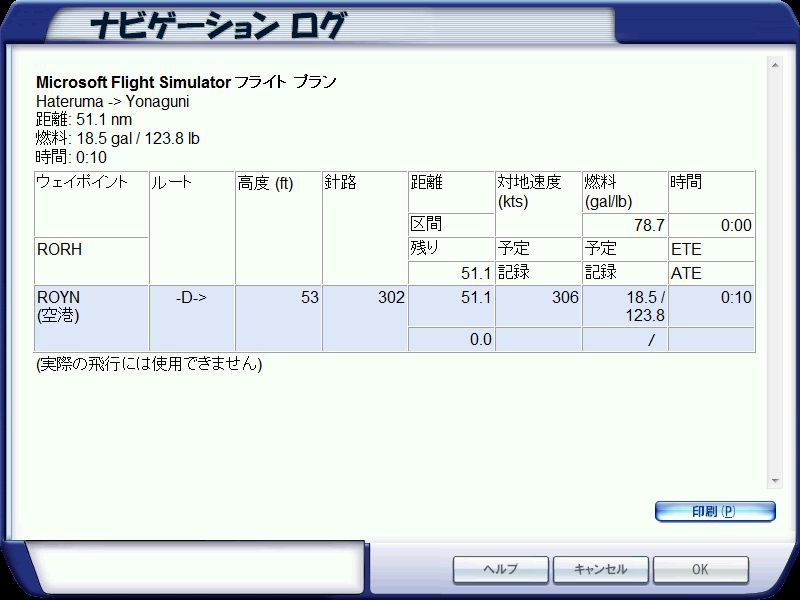
降下。


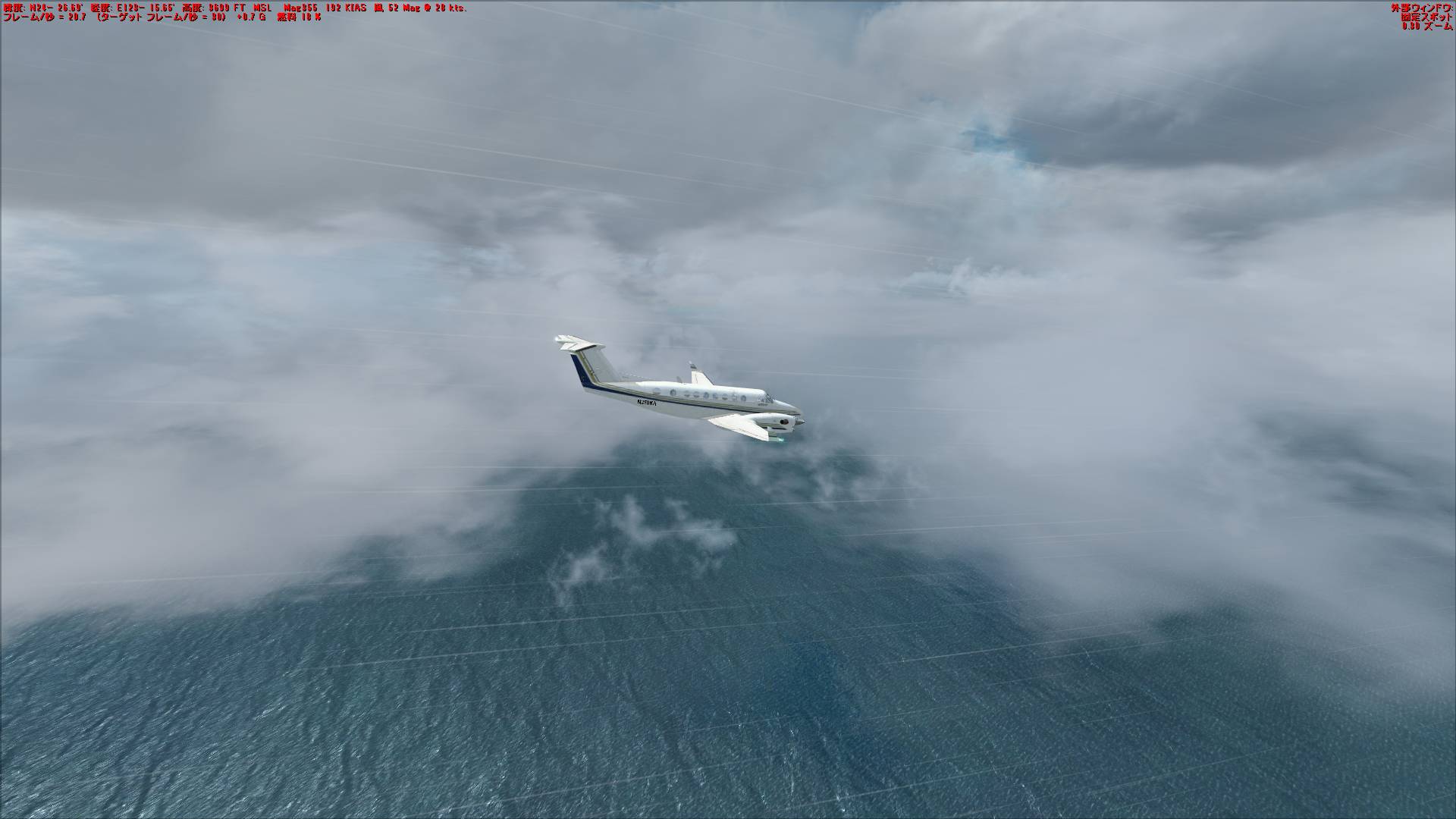
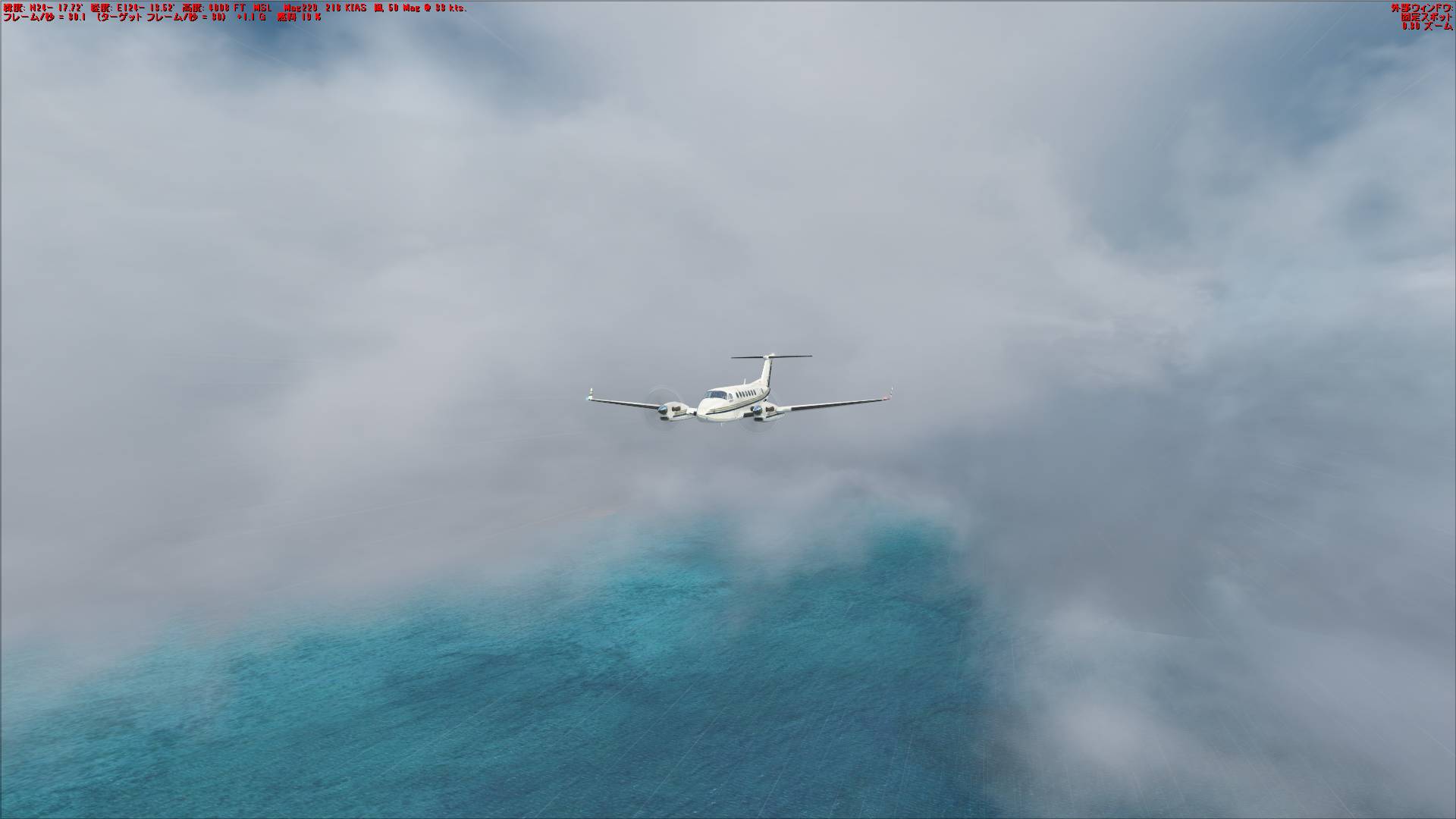
滑走路視認。

滑走路1へILSアプローチ。風向き337から風速17ノット。


タッチダウン。


駐機場。

54.9ガロン消費、ナビログ予想量との差は50.4ガロン。


フライトシムの記録
フライトプラン。
滑走路6から離陸。風向き337から風速16ノット。
上昇。
巡航高度。
降下。
滑走路視認。
滑走路1へILSアプローチ。風向き337から風速17ノット。
タッチダウン。
駐機場。
54.9ガロン消費、ナビログ予想量との差は50.4ガロン。
Bombardier Learjet 45に乗り換え。

とはいえ滑走路を選ぶ飛行機なので(4,700ft以上の舗装滑走路)、Learjetが離着陸できない空港・飛行場ではKing Airを使用する。操作の確認のため羽田・新千歳間を2往復した。
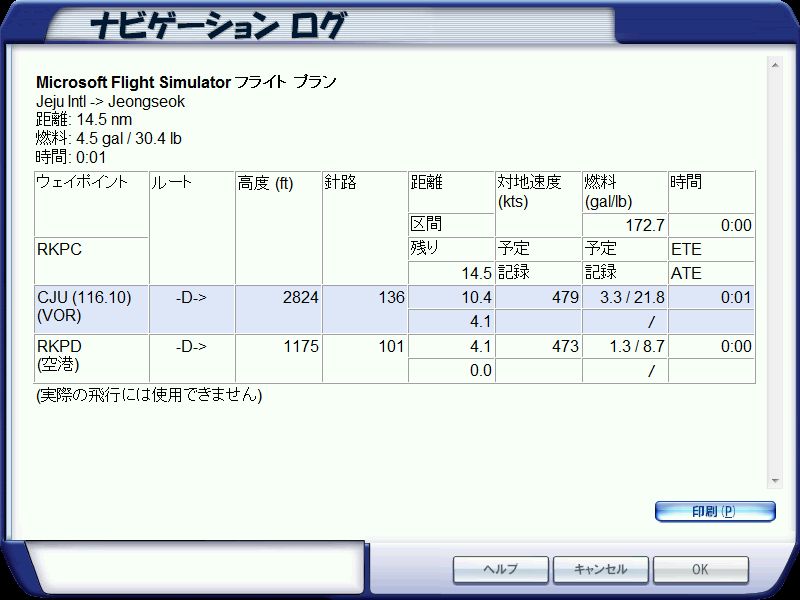
フライトプラン。

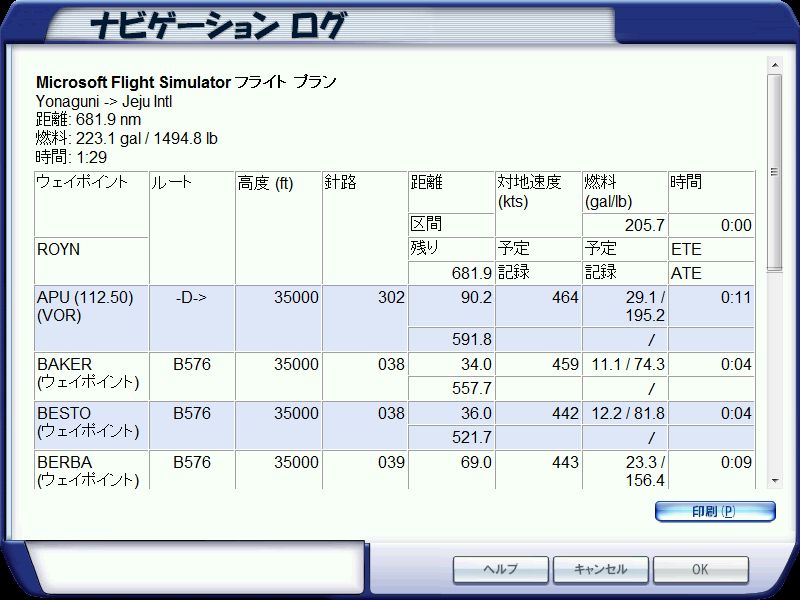
左右タンクが40ガロンを切ると燃料警告が出て煩わしく、ナビログの予想燃料量に200ガロンほど追加した。燃料は3つのタンクから均等に消費される。

滑走路26から離陸。風向き030から風速25ノットの追い風離陸だが、なぜか滑走路8が滑走路選択メニューに表示されなかった。

機首が風上に振られてしまう。

上昇。

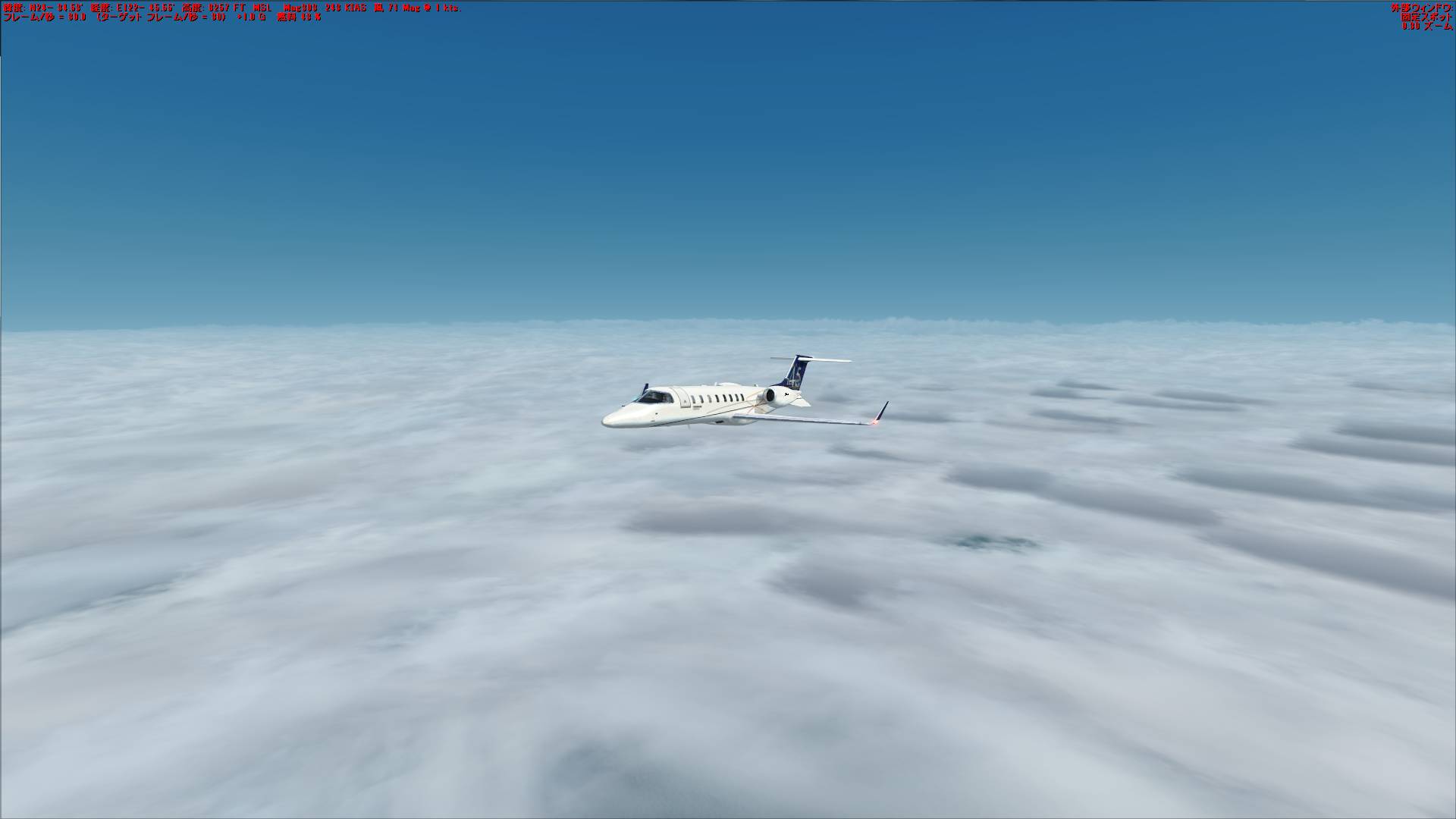
巡航高度。


この近距離ですれ違い。接近警報もトラフィックアドバイザリーもなかった。

降下。


滑走路視認。

滑走路6へILSアプローチ。風向き047から風速5ノット。


タッチダウン。着陸自体はKing Airと特に違いは感じられない。



駐機場。

419.8 – 172.4 = 247.4ガロン消費、ナビログの予想量との差は23.9ガロン。

Bombardier Learjet 45のチェックリスト。ゲーム内のニーボードのチェックリストと、Dauntless AviationのFree Aircraft ChecklistsのFSX用Learjet 45チェックリストを参考に自分で使いやすいようにアレンジしたもの。暫定版につき予告報告なく変更する場合あり。
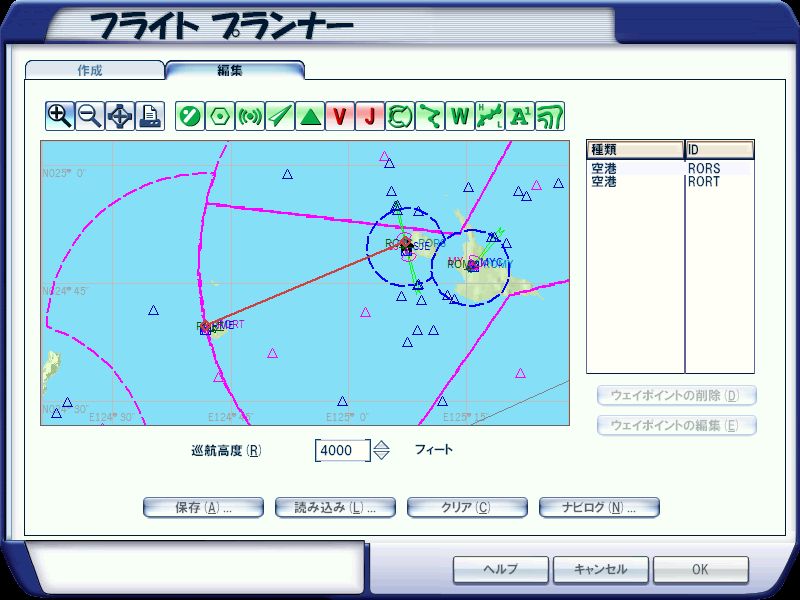
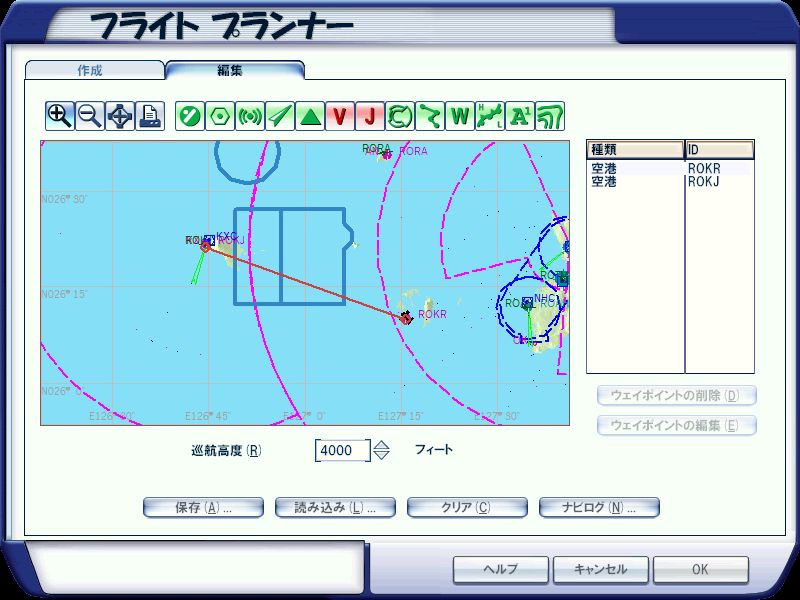
フライトプラン作成
[フライト環境]-[時刻と季節]を選択して日付と時刻を設定
[フライト]-[フライト プランナー]を選択
出発地と行き先を選択
[IFR(計器飛行方式)]を選択
ルーティング方法を設定
[ルートの検索]をクリック
[巡航高度]を設定(長距離飛行時は35,000フィート)
[ナビログ]で距離・燃料・時間を確認
[OK]を2回クリックして[保存]
「出発空港に移動しますか?」で[いいえ]
[航空機]-[燃料とペイロード]で積載量を設定
エンジン始動前
パーキング ブレーキ: セット
スロットル コントロール: IDLE
燃料供給: CUTOFF(Ctrl+Shift+F1)
着陸装置レバー: DN
バッテリ スイッチ: オン
計器パネル照明灯スイッチ: 必要に応じてオン
着陸装置位置表示灯: 点灯を確認
左および右ジェネレータ スイッチ: オフ
エレベータ動作: 確認
エルロン動作: 確認
ラダー動作: 確認
フラップ動作: 確認
フラップ: UP
スポイラー: RET
APUスイッチ: START
APU: 起動を確認
燃料量: チェック
エンジン計器: チェック
ピトー ヒート スイッチ: オフ
除氷スイッチ: オフ
トリム: セット
アビオニクス マスター スイッチ: オン
気象状況: 確認(ATIS、X Gaugeなど)
GPS: 確認
IFRクリアランス: 要請
トランスポンダー: セット
衝突防止灯スイッチ: オン
認識灯スイッチ: オン
エンジン始動
エンジン エリア: クリア
燃料供給: オン(Ctrl+Shift+F4)
右イグニッション スイッチ: オン
右エンジン スターター スイッチ: オン
右 FF: チェック
右エンジン N1 増加および N2 増加: チェック
右 ITT: チェック
右エンジン油圧計: チェック
右エンジン計器: 正常かどうかチェック
右エンジン スターター スイッチ: オフ
右ジェネレータ スイッチ: オン
左イグニッション スイッチ: オン
左エンジン スターター スイッチ: オン
左 FF: チェック
左エンジン N1 増加および N2 増加: チェック
左 ITT: チェック
左エンジン油圧計: チェック
左エンジン計器: 正常かどうかチェック
左エンジン スターター スイッチ: オフ
左ジェネレータ スイッチ: オン
ピトー ヒート スイッチ: オン
除氷スイッチ: オン
APUスイッチ: STOP
離陸準備
航空灯スイッチ: オン
高度計規正値: セット(PFDとスタンバイ高度計)
高度計: チェック
NAV/GPS モード スイッチ: GPS
OBS: 確認
針路セレクタ: セット
高度保持セレクタ: セット
昇降率保持セレクタ: 2,000ft/min
無線機: 必要に応じてセット
自動操縦マスター スイッチ: オフ
速度保持スイッチ: オフ
針路保持スイッチ/ナビゲーション保持スイッチ: 必要に応じてオン
高度保持スイッチ: オン
ヨー ダンパー保持スイッチ:オン
フライト ディレクタ スイッチ: オン
スポイラー レバー: ARM
マスター コーション ライト: 消灯を確認
滑走路へタキシング
タキシングクリアランス: 要請
タクシー灯スイッチ: オン
着陸灯スイッチ: 必要に応じてオン
パーキング ブレーキ: 解除
ブレーキ: 走行中に動作確認
水平位置指示器: 走行中に動作確認
水平儀: 走行中に動作確認
旋回滑り計・傾斜計: 走行中に動作確認
滑走路番号表示: 確認
離陸直前
パーキング ブレーキ: セット
スロットル コントロール: IDLE
着陸灯スイッチ: オン
フラップ: 8度
スポイラー: RET
V1 速度: 確認(107 KIAS)
VR 速度: 確認(20,000 lbs/海面気圧時、118 KIAS)
V2 速度: 確認(20,000 lbs/海面気圧時、129 KIAS)
離陸許可: 要請
離陸
先行機: 先行機が離着陸してから数分待機
ブレーキ: ホールド
スロットル コントロール: T/O
ブレーキ: 解除
VR: 10~15度機首上げ
上昇開始後: ブレーキを軽くホールド
着陸装置レバー: UP
着陸装置位置表示灯: 消灯を確認
フラップ: UP(V2 + 25 KIAS)
マスター コーション ライト: 消灯を確認
エンジン計器: チェック
上昇
自動操縦マスター スイッチ: 必要に応じてオン
速度保持スイッチ: 必要に応じてオン
速度保持セレクタ: Mach 0.7まで250 KIAS、それ以降はMach 0.7
左右イグニッションスイッチ: オフ
着陸灯スイッチ: オフ
タクシー灯スイッチ: オフ
エンジン計器: 監視
対気速度計: 監視
高度計規正値: 2992(FL180に到達したら)
巡航
高度計: 巡航高度
昇降計: 0 ft/min
対気速度計: Mach 0.77または280 KIAS
巡航中
マスター コーション ライト: 消灯を確認
エンジン計器: 監視
燃料量: 監視
高度計: 監視
水平位置指示器: 監視
(目的地まで120nmに接近したら)
気象状況: 確認(ATIS、X Gaugeなど)
燃料バランス: チェック
降下
自動操縦マスター スイッチ: 必要に応じてオフ
速度保持スイッチ: 必要に応じてオフ
スロットル コントロール: 必要に応じてセット(手動操作の場合)
昇降率保持セレクタ: 2,000ft/min
対気速度計
FL240まで Mach 0.73
FL180まで Mach 0.65
10,000ftまで 280 KIAS
10,000ft以下 250 KIAS
高度計規正ノブ: 規正値セット(FL180より降下したら)
気象状況: 確認(ATIS、X Gaugeなど)
アプローチ
(着陸滑走路を指定されたら)
NAV 1 周波数: ILSにセット(ILS進入の場合)
NAV 1 音声セレクタ: 必要に応じてオン
マーカー 音声セレクタ: 必要に応じてオン
針路保持スイッチ: 必要に応じてオン
NAV/GPS モード スイッチ: NAV
OBS: 滑走路に合わせてセット
GPS進入手順: ロード
VREF速度: 確認(102~123 KIAS)
高度計規正値: 規正値セット
(ILSを受信、または30nmまで接近したら)
GPS進入手順: アクティベート
着陸灯スイッチ: オン
タクシー灯スイッチ: オン
APUスイッチ: START
APU: 起動を確認
左右イグニッションスイッチ: オン
対気速度計: 200 KIAS
(ローカライザをインターセプト、または滑走路に正対したら)
フラップ: 8度
スポイラー: ARM
対気速度計: 180 KIAS
先行機: 間隔を6nmあけて、先行機の航跡より高度を上げる。必要ならゴーアラウンド
(グライドスロープをインターセプトしたら)
フラップ: 20度
着陸装置レバー: DN
着陸装置位置表示灯: 点灯を確認
対気速度計: 155 KIAS
着陸
(対地高度 300~500 ftになったら)
フラップ: DN
パーキング ブレーキ: 解除を確認
対気速度計: VREF
(滑走路端を越えたら)
スロットル コントロール: IDLE
(タッチダウンしたら)
スロットル コントロール: リバース(60 KIASで解除)
スポイラー: EXTになっていることを確認
ブレーキ: 必要に応じてホールド
給油所・駐機場へタキシング
フラップ: UP
スポイラー: RET
トリム: セット
タキシングクリアランス: 要請
エンジン停止・係留
パーキング ブレーキ: セット
スロットル コントロール: IDLE
ピトー ヒート スイッチ: オフ
除氷スイッチ: オフ
着陸灯スイッチ: オフ
タクシー灯スイッチ: オフ
航空灯スイッチ: オフ
フライト ディレクタ スイッチ: オフ
アビオニクス マスター スイッチ: オフ
左右イグニッション スイッチ: オフ
燃料供給: CUTOFF(Ctrl+Shift+F1)
左および右ジェネレータ スイッチ: オフ
認識灯スイッチ: オフ
衝突防止灯スイッチ: オフ
APUスイッチ: STOP
バッテリ スイッチ: オフ
フライトプラン。

滑走路2から離陸。風向き045から風速27ノット。


上昇。


巡航高度。


降下。

滑走路視認。

滑走路26へビジュアルアプローチ。風向き070から風速18ノット。


タッチダウン。



駐機場。

フライトプラン。


滑走路4から離陸。風向き030から風速21ノット。


上昇。


巡航高度。

降下。


滑走路2へビジュアルアプローチ。風向き036から風速30ノット。

滑走路視認。


タッチダウン。



駐機場。

2013年の新石垣空港(ROIG)の開港に伴い当空港は廃止されている。
フライトプラン。

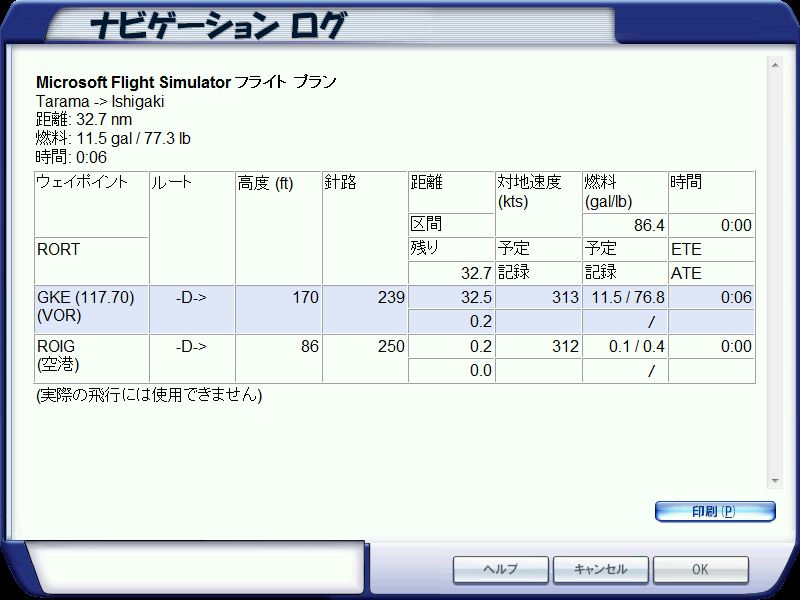
滑走路36から離陸。風向き070から風速14ノット。


上昇。


巡航高度。


降下。


滑走路視認。

滑走路4へビジュアルアプローチ。風向き070から風速12ノット。


タッチダウン。



駐機場。

フライトプラン。
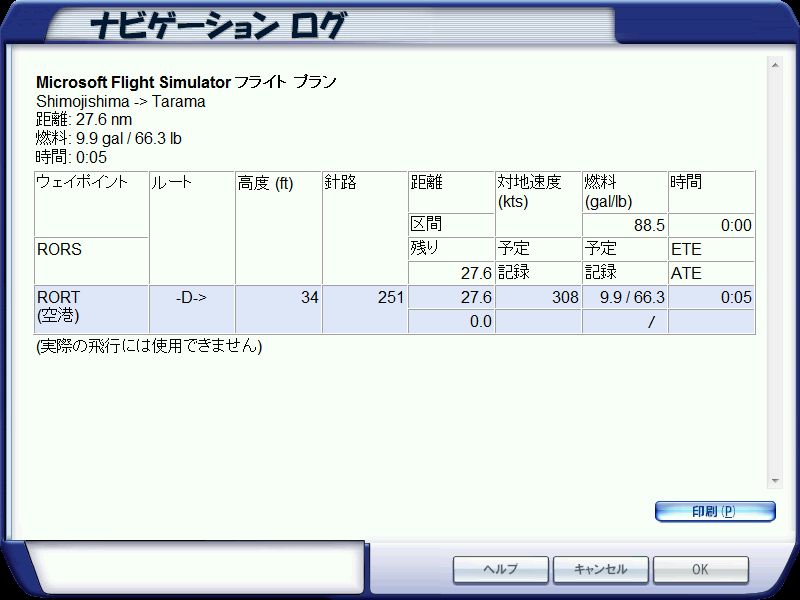
滑走路17から離陸。風向き080から風速13ノット。


上昇。


巡航高度。

降下。


滑走路視認。

滑走路36へビジュアルアプローチ。風向き082から風速11ノット。


タッチダウン。


駐機場。

フライトプラン。

滑走路4から離陸。風向き080から風速12ノット。


上昇。


巡航高度。

降下。


滑走路視認。

滑走路17へILSアプローチ。風向き080から風速18ノット。


タッチダウン。


ゲートはあるのだが駐機場はない。

フライトプラン。

滑走路21から離陸。風向き147から風速10ノット。


上昇。


巡航高度。


降下。


滑走路4へビジュアルアプローチ。風向き300~010から風速6ノット。滑走路22のローカライザをバックコースで使用。

滑走路視認。


タッチダウン。



駐機場。

フライトプラン。
滑走路2から離陸。風向き020~090から風速10ノット。


上昇。


巡航高度。


降下。


滑走路視認。

滑走路3へビジュアルアプローチ。風向き075から風速17ノット。


タッチダウン。



駐機場。
