簡単な着陸。
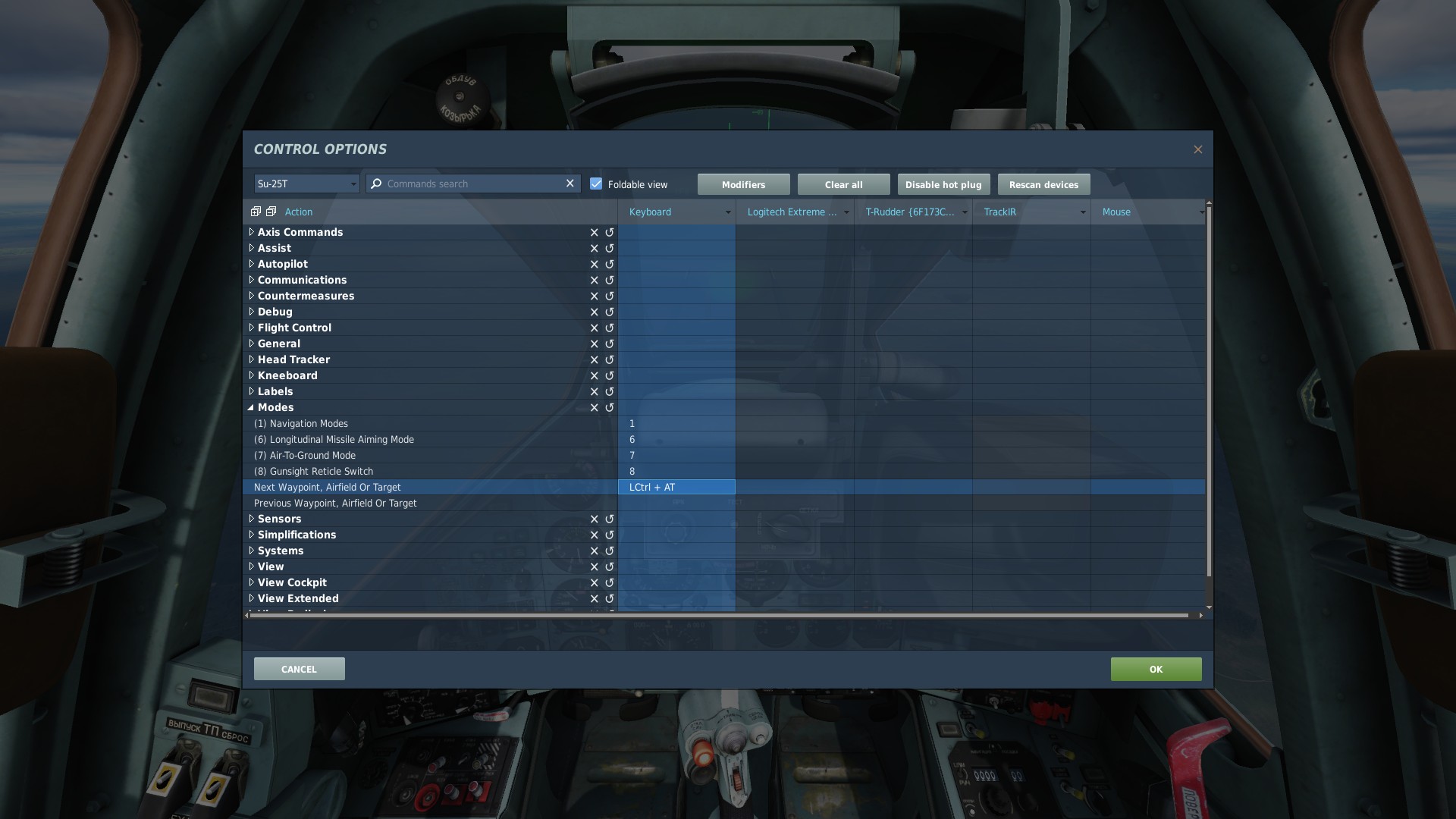
このトレーニング中に、次のウェイポイントを選択するためにCtrl+`キーを押す手順があるのだが、日本語キーボードだと入力できないので、別のキーに割り当てておく。対象は[Modes]-[Next Waypoint, Airfield Or Target]で、今回はCtrl+@キーに割り当てた。
ブリーフィング。
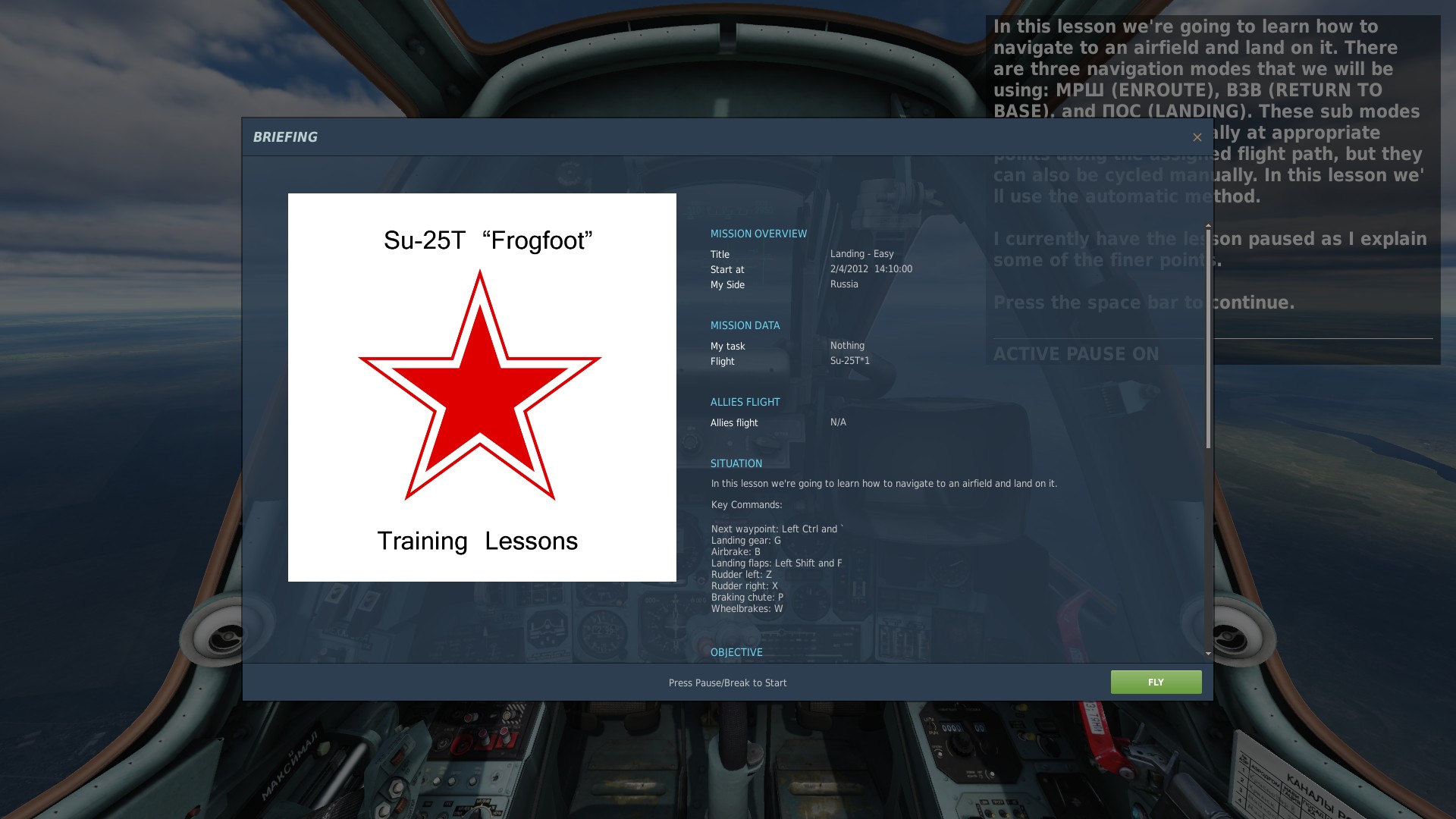
このレッスンでは、飛行場まで飛行する方法と着陸の仕方を学ぶ。今回はENROUTE(МРШ)、RETURN TO BASE(ВЗВ)、LANDING(ПОС)の三つのナビゲーションモードを使う。これらのサブモードは、割り当てられた飛行経路のしかるべき位置で自動的に切り替わる。手動で切り替えることもできるが、このレッスンでは自動切り替えを使用する。
詳細な説明をする間、レッスンはポーズされている。
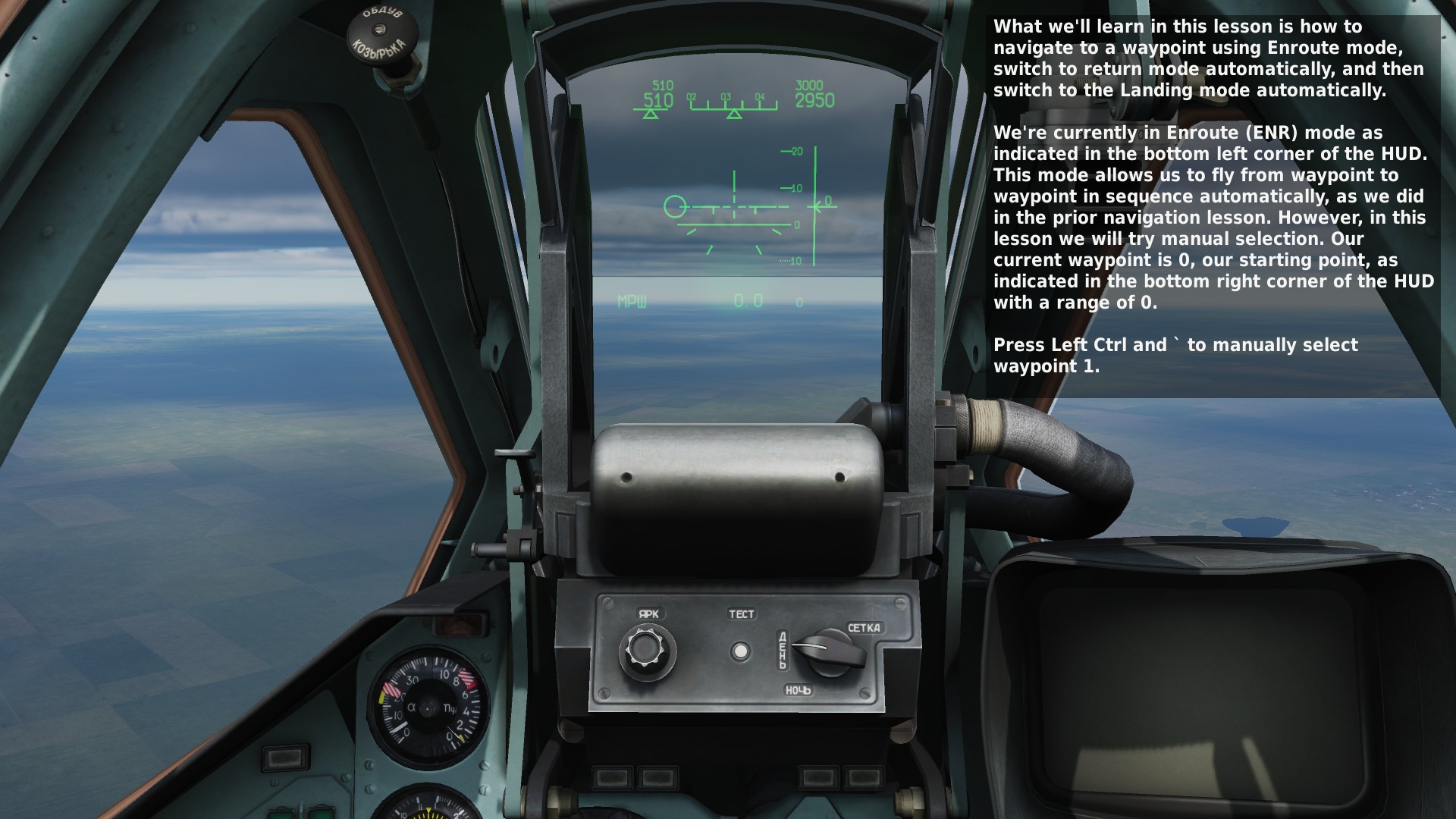
このレッスンでは、ENROUTEモードを使ってウェイポイントへ飛行する方法と、RETURN モードおよびLANDINGモードに自動で切り替える方法を学ぶ。
HUDの左下に「 МРШ 」と表示されているが、これは現在ENROUTEモードであることを示している。このモードは、前回のレッスンでも使用したとおり、ウェイポイントからウェイポイントへ順に飛行するモードである。ただし、今回のレッスンでは手動選択を試してみる。現在のウェイポイントは出発地点の0で、HUDの右下に0と表示されており、そこへの距離は0.0kmである。
左Ctrl+`キー(または変更したキー)を押してウェイポイント1を手動選択する。
HUDの右下に1と表示され、距離が8.6kmになる。
Ctrl+`キーをもう一度押してウェイポイント2を選択する。

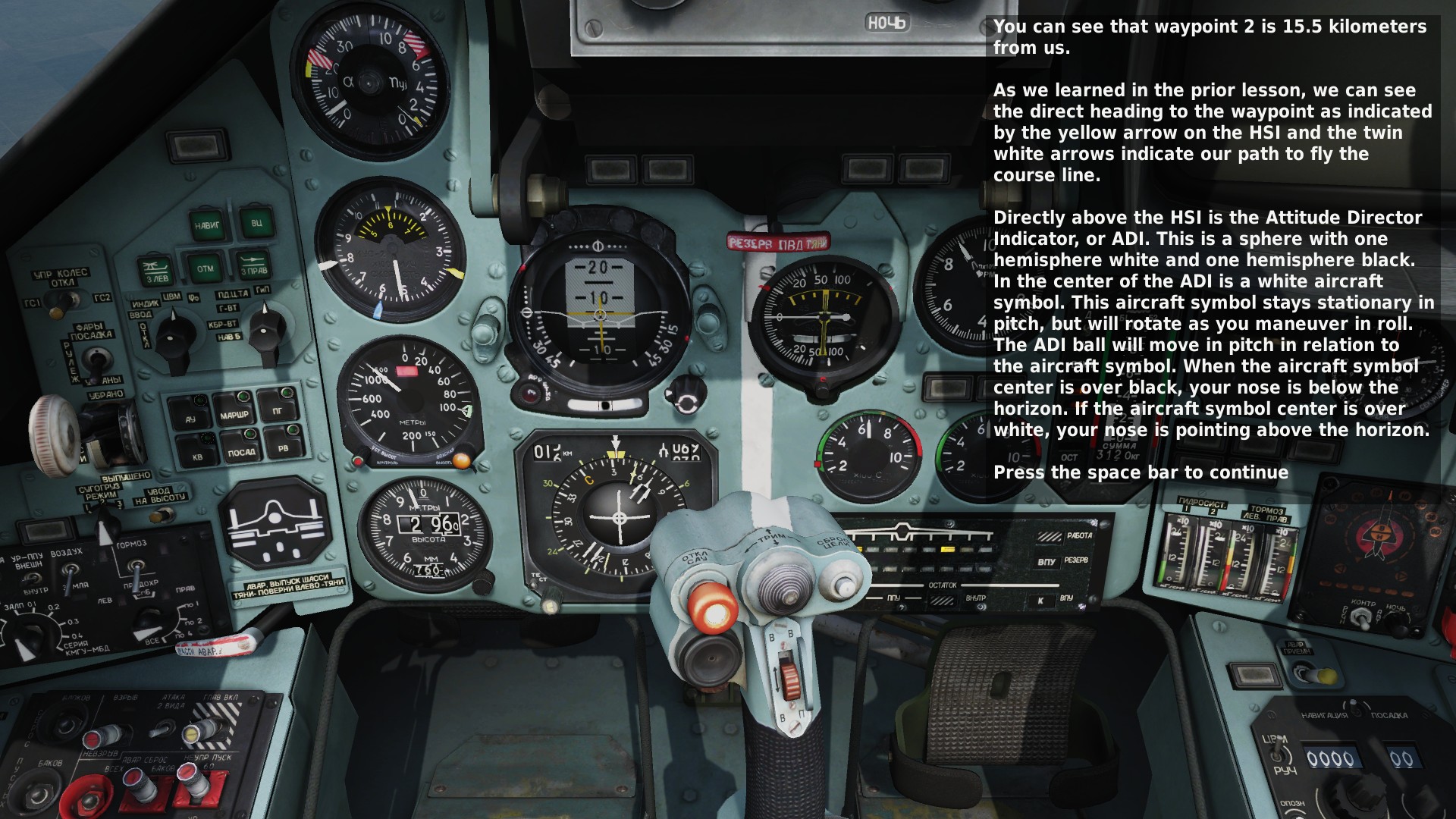
ウェイポイント2までの距離15.5kmが表示される。
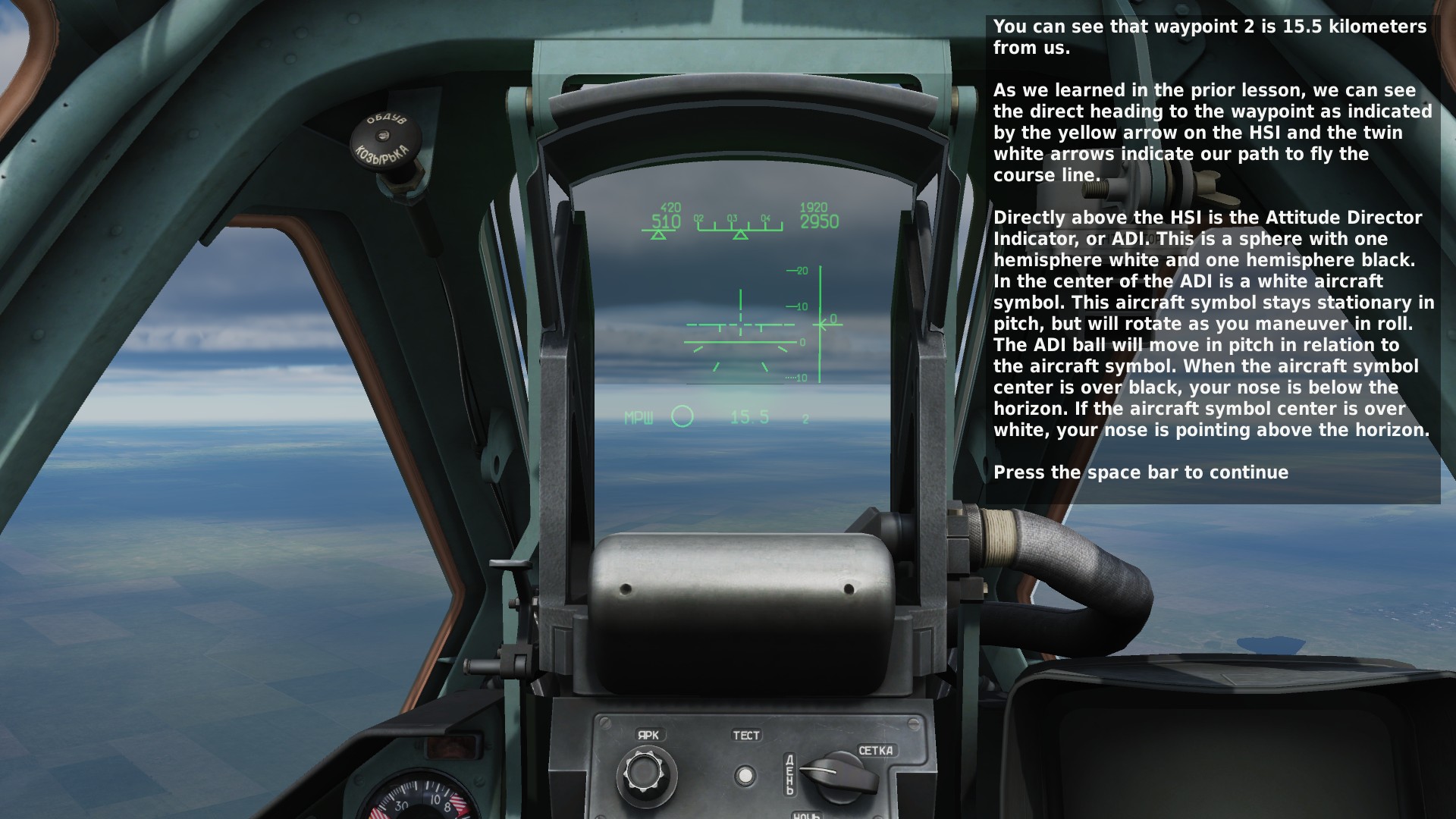
前のレッスンで学んだとおり、選択したウェイポイントの方向がHSIの黄色い矢印で、飛行するべき方向が二重の白い矢印で、それぞれ示される。
HSIのすぐ上に、姿勢指示器(Attitude Director Indicator、ADI)がある。この計器は上半分が白、下半分が黒の球からなり、中央に飛行機を模した白い図形がある。この飛行機図形は実際の機体のロールに伴って傾き、ADIの球体は機体のピッチに伴い回転する。機首が水平線の下を向いているとき飛行機図形の中央は球体の黒い部分に入り、機首が水平線の上を向いているとき飛行機図形の中央は球体の白い部分に入る。
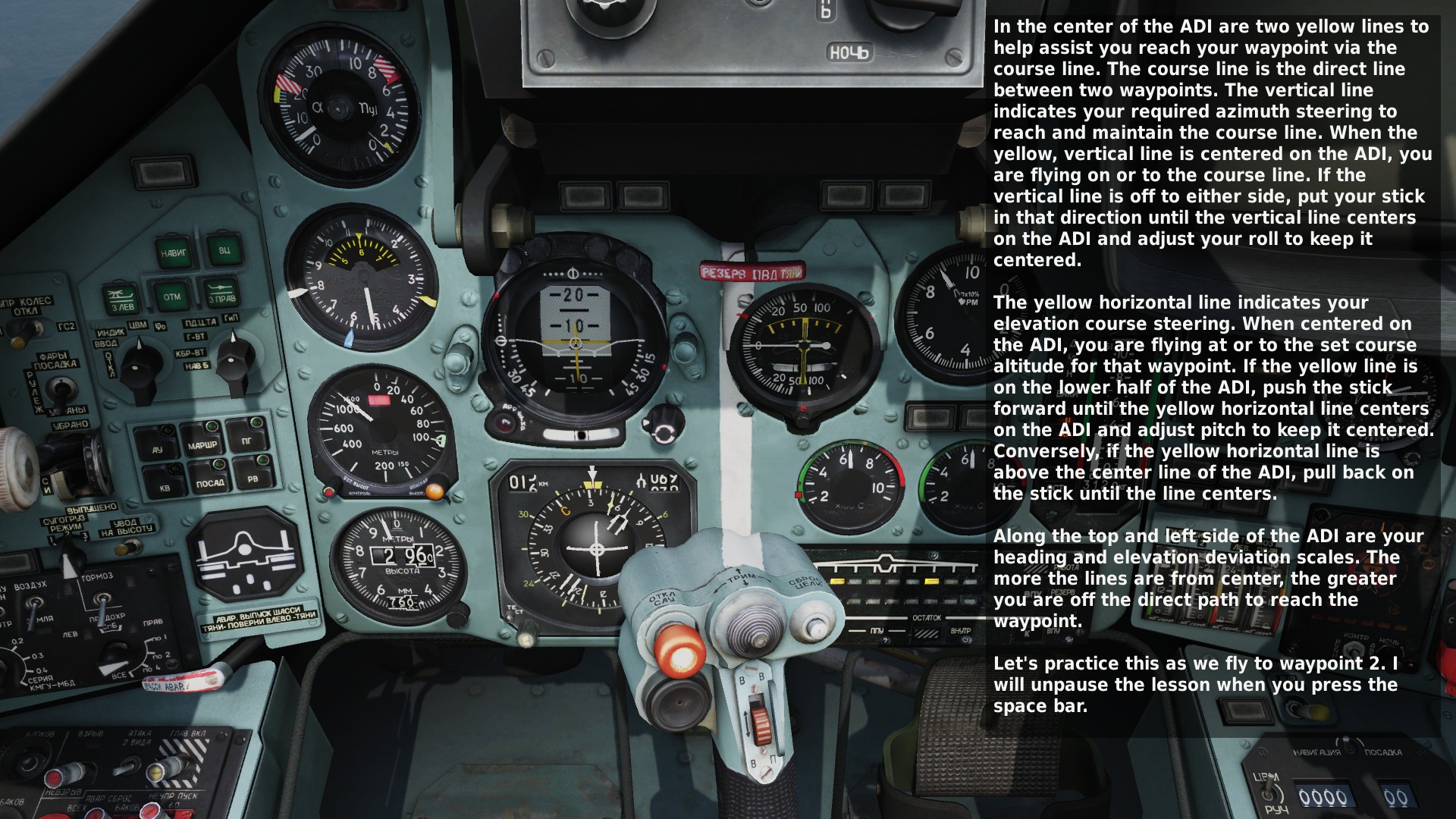
ADIの中央部の二本の黄色い線は、ウェイポイントまでの針路を示す補助となる。垂直線は針路を維持するのに必要な左右の操舵を示している。黄色の垂直線がADIの中央にあれば、針路上を正しく飛行している。左右どちらかにずれていたら、その方向に操縦桿を倒し、垂直線が中央になるように調整する。
黄色の水平線は昇降方向の操舵を示している。ADIの中央にあれば、正しい昇降コースを飛行している。黄色の水平線がADIの下半分にあったら、操縦桿を押して中央に持ってくる。ADIの上半分だったら、操縦桿を引く。
ADIの上端と左端には、針路と昇降のずれを示す目盛りがある。実際の針路のずれが大きくなると、目盛り上の線のずれも大きくなる。
スペースキーを押すとポーズが解除され、ウェイポイント2への飛行訓練が開始される。
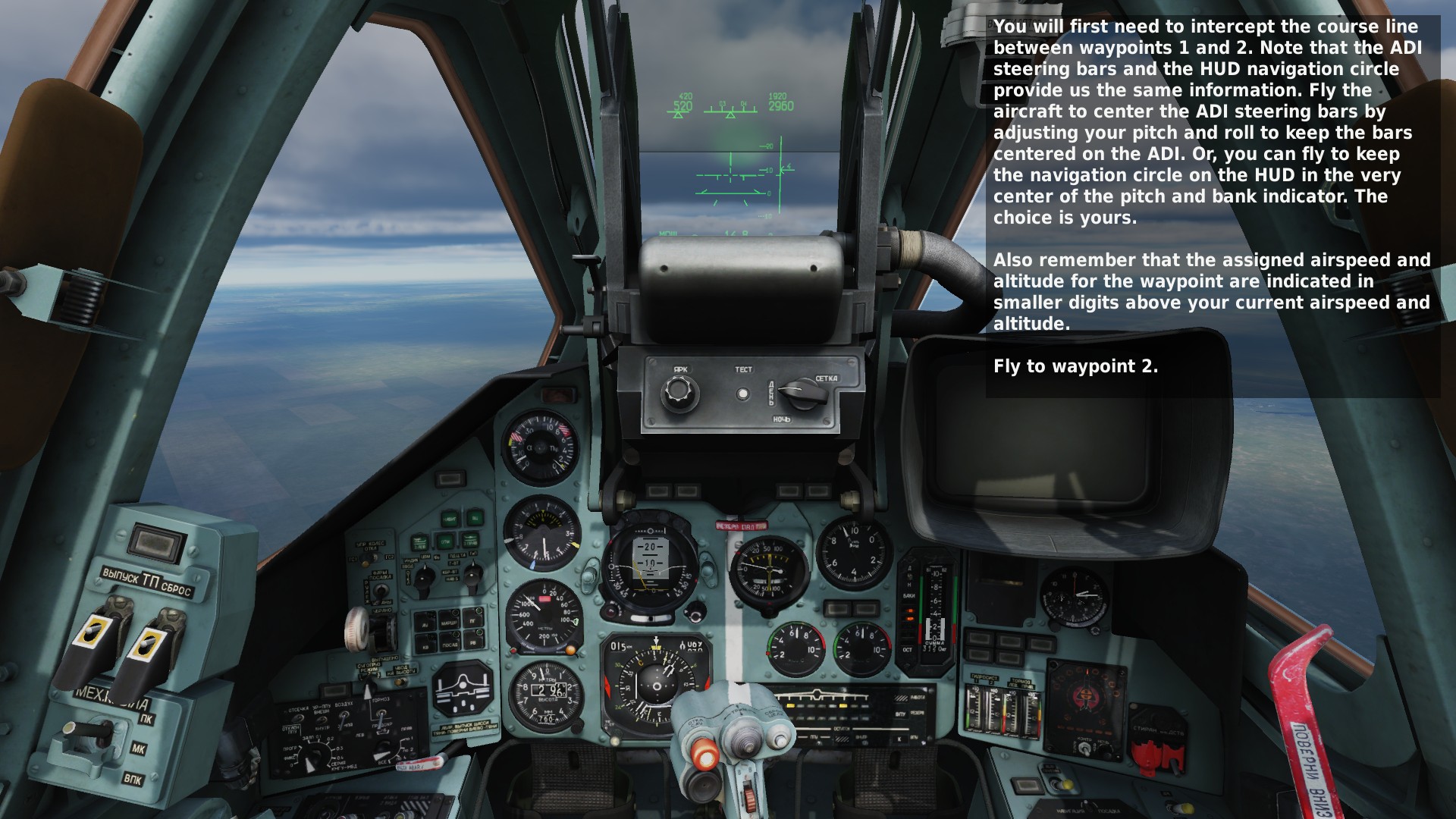
まず、ウェイポイント1から2へ進むコースの直線に会合する必要がある。ADIの線とHUDの円は同じ情報を示している。ADIの線を中央に持ってくるように操縦するか、またはHUDの円を中央に持ってくるように操縦するか、どちらを選んでも良い。
また、ウェイポイントに指定された対気速度と高度は、HUDの現在の対気速度と高度の上に小さい文字で表示されている。
急降下気味だがウェイポイント2に到達。次のウェイポイントは自動的にウェイポイント3に切り替わる。
速度400km/h前後でウェイポイント3まで針路上を飛行する。

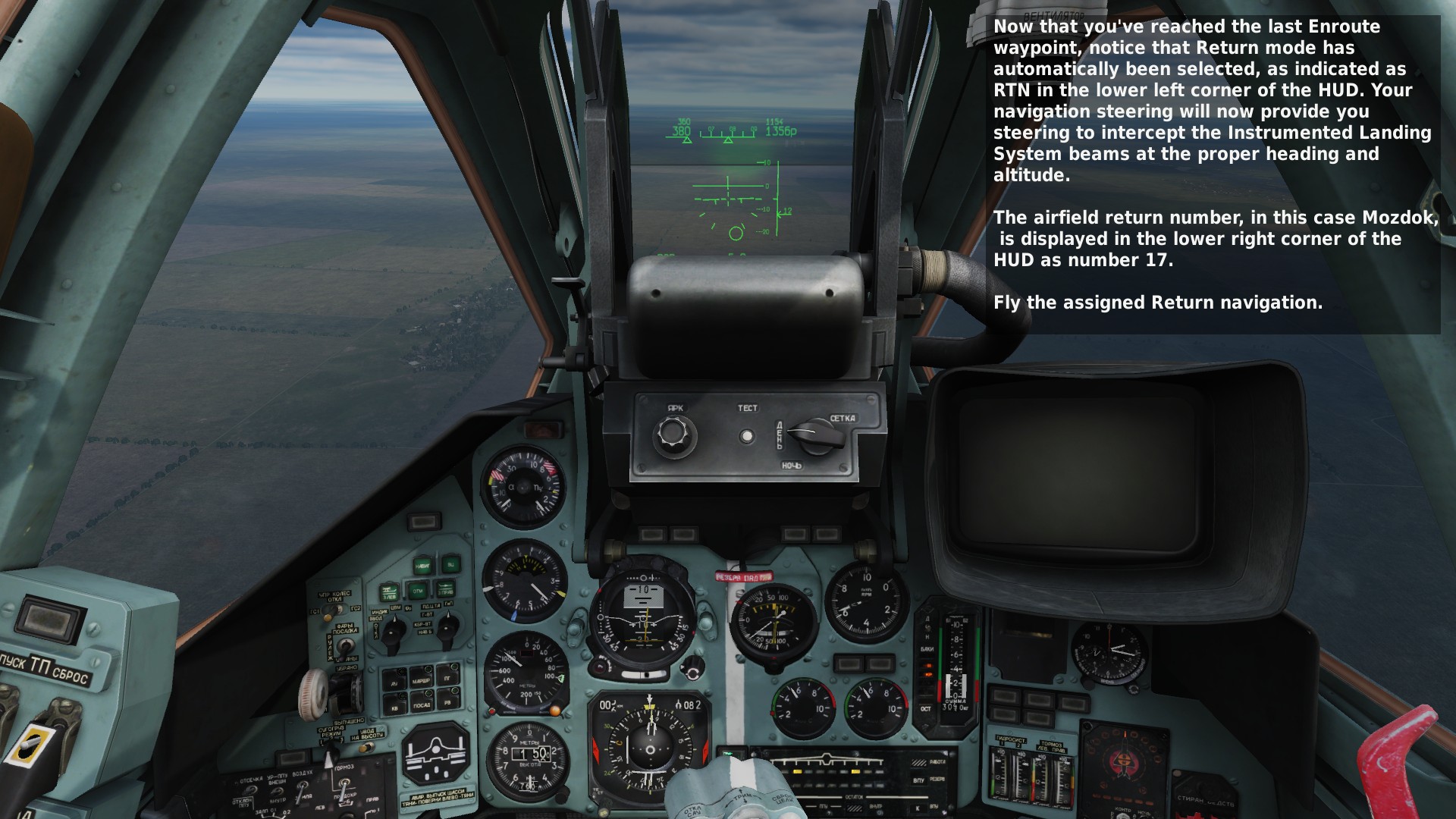
最後のENROUTEウェイポイントに到達すると、自動でRETURNモードに切り替わり、HUD左下に「 ВЗВ 」と表示される(画像では見えないが)。HUDとADIはILSに会合するための情報を表示する。
HUDの右下には飛行場リターン番号が表示される(やはり画像では見えないが)。Mozdok飛行場の場合は17。
指定されたRETURN針路を飛行する。
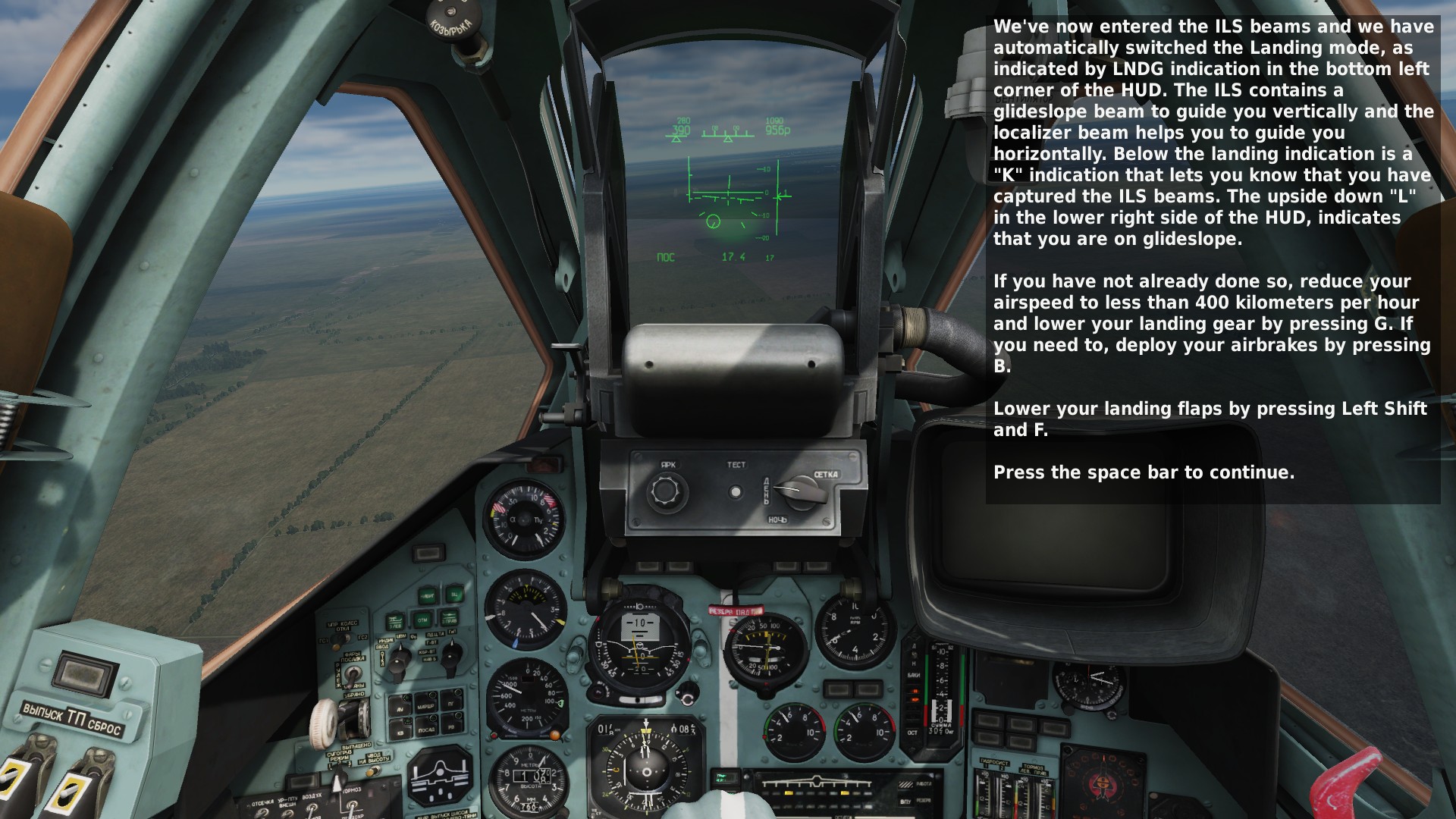
ILSに会合すると、自動でLANDINGモードに切り替わり、HUDの左下に「 ПОС 」と表示される。 「 ПОС 」 の右に「K」が表示され(二つ下の画像参照)、ILSに会合したことを示す。グライドスロープに会合すると、上下逆さまになった「L」がHUD右下のウェイポイントの左に表示される( 二つ下の画像参照 )。
対気速度を400km/h以下に落とし、Gキーで着陸脚を下ろす。必要であればBキーで空力ブレーキを使う。
左Shift+Fキーでフラップを下ろす。
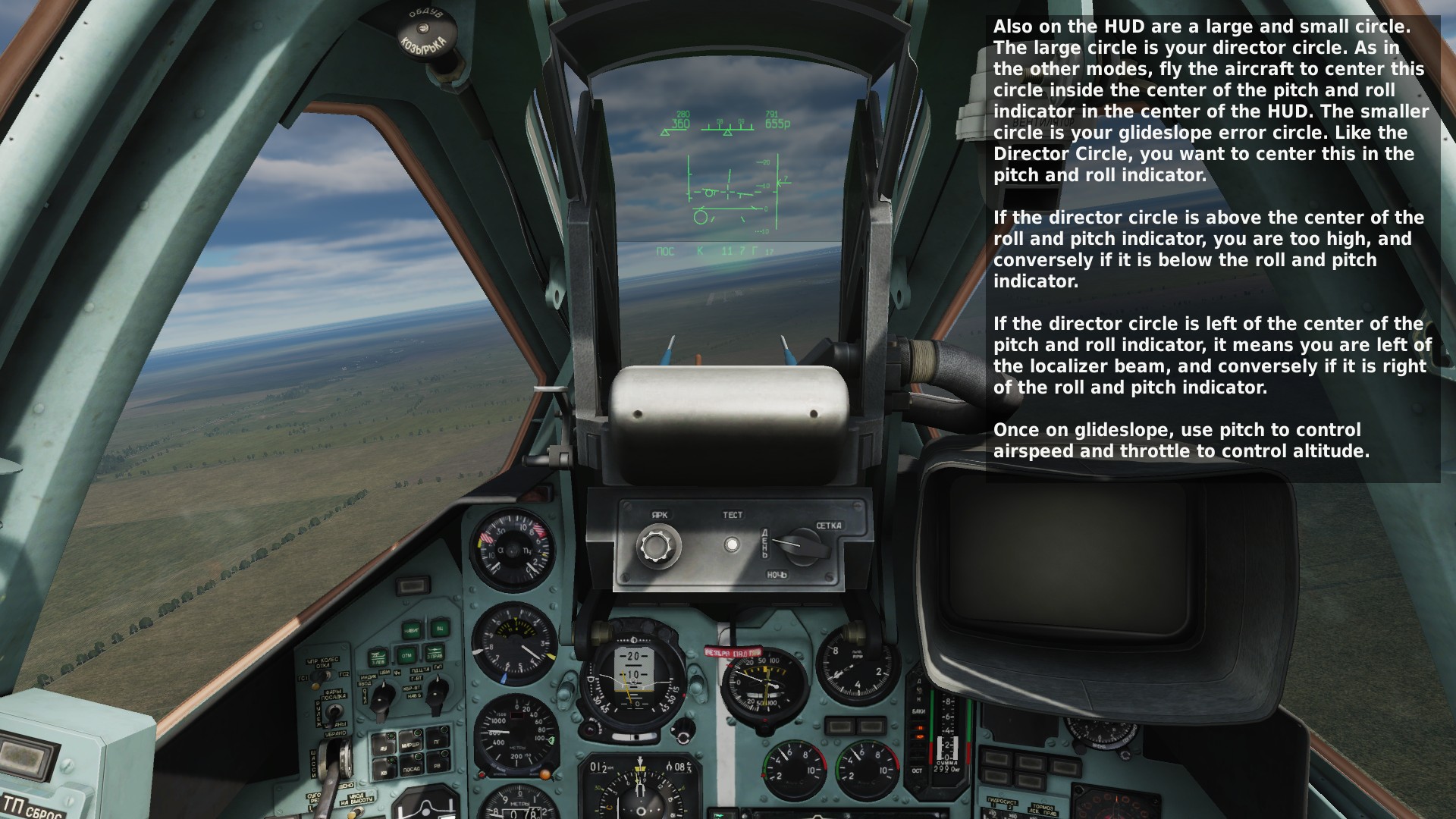
現在HUDには大小二つの円が表示されている。大きい円は針路を示し、小さい円はグライドスロープとのずれを示す。両方ともHUDの中央に来るように操縦する。
グライドスロープに乗ったら、ピッチで対気速度を、スロットルで姿勢を制御する。
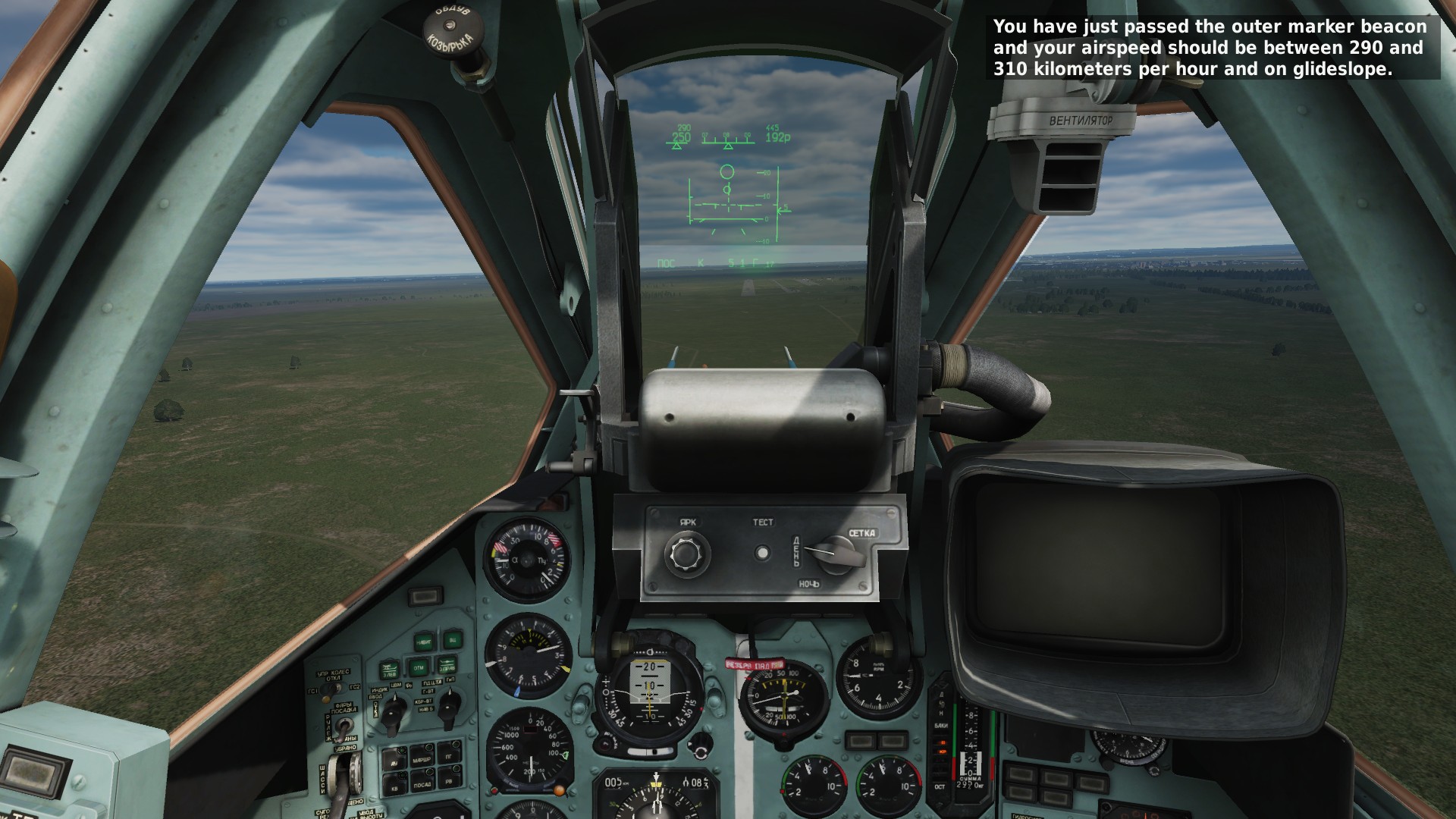
アウターマーカー通過。対気速度は290~310km/h。画像は少し遅いうえにグライドスロープの下に降下している。
インナーマーカー通過。対気速度250~270km/h。高度と速度は持ち直した。少々右にずれている。

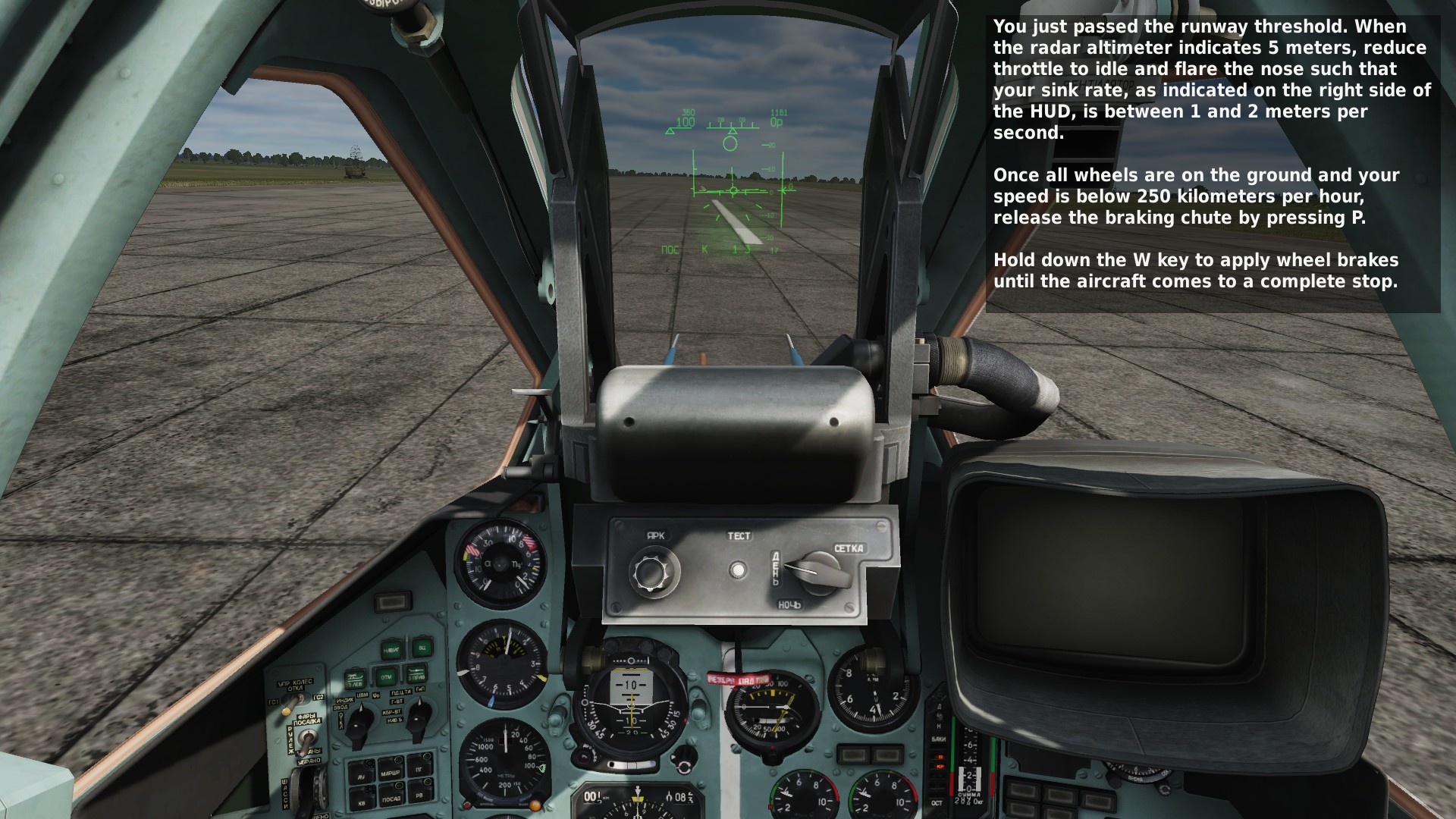
滑走路端を通過(実際にはまだ先だが)。電波高度計が5mになったら、スロットルをアイドルまで絞り、フレアをかけて、HUD右端の降下速度が1~2m/sになるようにする。

車輪が全部接地して速度が250km/h以下になったら、Pキーを押してドラッグシュートを開く(今回はこれに気付かず開かなかった)。
Wキーで車輪ブレーキをかけ、機体を完全に停止させる。
無事着陸成功。ESCキーでレッスン終了。

デブリーフィング。