フライトプラン作成
[フライト環境]-[時刻と季節]を選択して日付と時刻を設定
[フライト]-[フライト プランナー]を選択
出発地と行き先を選択
[IFR(計器飛行方式)]を選択
ルーティング方法を設定
[ルートの検索]をクリック
[巡航高度]を設定(長距離飛行時は30,000フィート)
[ナビログ]で距離・燃料・時間を確認
[OK]を2回クリックして[保存]
「出発空港に移動しますか?」で[いいえ]
[航空機]-[燃料とペイロード]で積載量を設定
エンジン始動前
パーキング ブレーキ: セット
スラスト レバー: アイドル
プロペラ レバー: 前方いっぱい
コンディション レバー: 燃料カットオフ
着陸装置レバー: ダウン
バッテリ スイッチ: オン
計器灯: オン
着陸装置位置表示灯: 点灯を確認
燃料計(左右): 確認
エレベータ動作: 確認
エルロン動作: 確認
ラダー動作: 確認
フラップ動作: 確認
フラップ レバー: アップ
アビオニクス マスター スイッチ: オン
気象状況: 確認(ATIS、X Gaugeなど)
GPS: 確認
除氷スイッチ: オン
ピトー ヒート スイッチ: オン
除氷装置警告灯(6個): 点灯を確認
IFRクリアランス: 要請
トランスポンダー: セット
衝突防止灯スイッチ: オン
エンジン始動
プロペラ エリア: クリア
コンディション レバー: ハイ アイドル
プロペラ同調スイッチ: オフ
右エンジン始動スイッチ: オン
右エンジン計器: 右トルク計が最低12%で安定するまで監視
右コンディション レバー: ロー アイドル
右吸気タービン温度計: 監視
右トルク計: 監視
右燃料圧不足警告灯: 消灯を確認
右油圧不足警告灯: 消灯を確認
右滑油圧力計: 確認
右コンディション レバー: ハイ アイドル
右ジェネレータ スイッチ: オン
左エンジン始動スイッチ: オン
左エンジン計器: 左トルク計が最低12%で安定するまで監視
左コンディション レバー: ロー アイドル
左吸気タービン温度計: 監視
左トルク計: 監視
左燃料圧不足警告灯: 消灯を確認
左油圧不足警告灯: 消灯を確認
左滑油圧力計: 確認
左コンディション レバー: ハイ アイドル
左ジェネレータ スイッチ: オン
離陸準備
水平儀: チェック
水平位置指示器: チェック
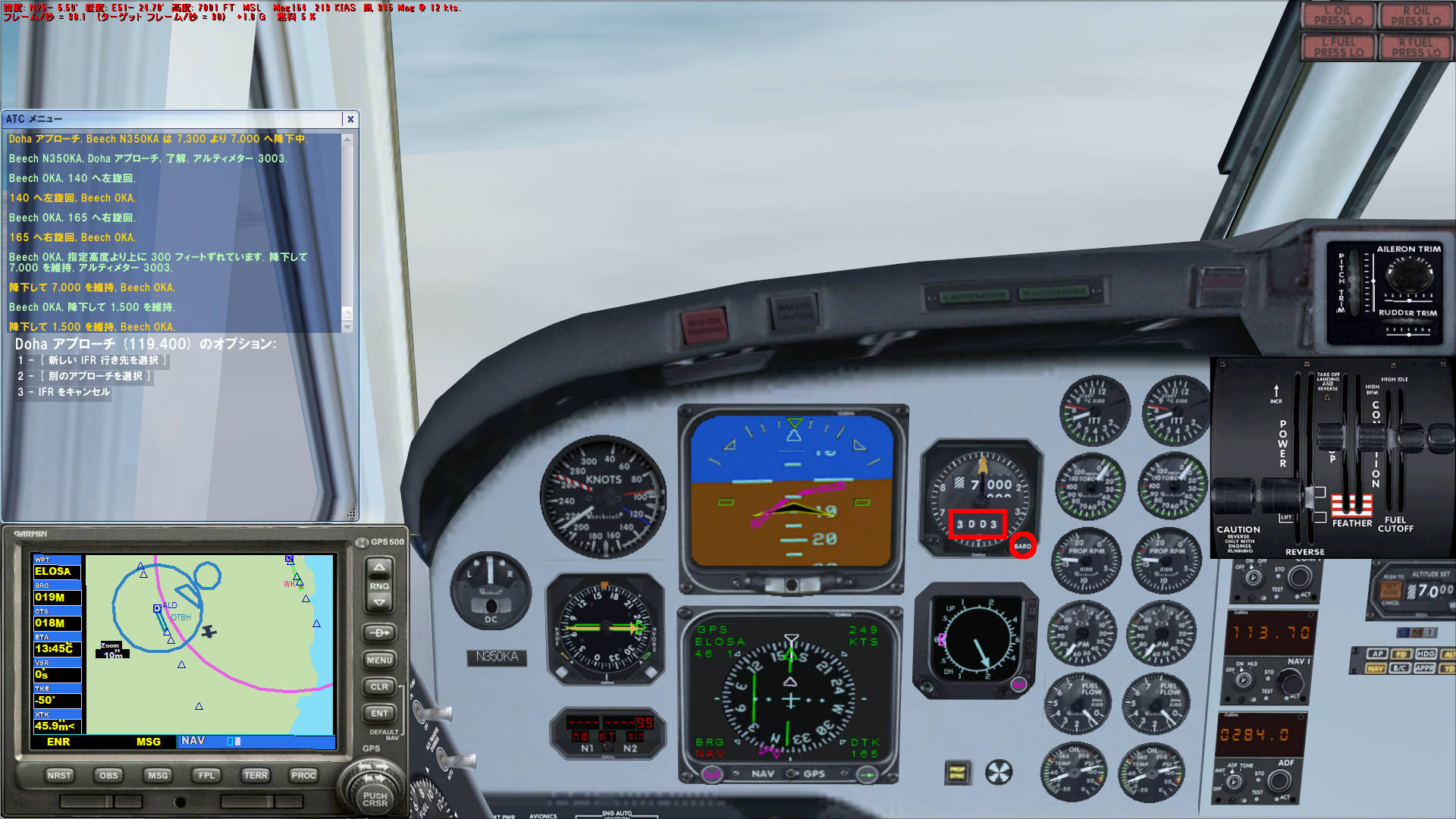
高度計規正ノブ: 規正値セット
高度計: チェック
対気速度計: チェック
昇降計: チェック
旋回滑り計・傾斜計: チェック
NAV/GPS モード スイッチ: GPS
OBS: セット
高度警報装置: セット
昇降率設定ノブ: 2,000 ft/min
無線機: 必要に応じてセット
自動操縦マスター スイッチ: オフ
針路保持スイッチ: オフ
高度保持スイッチ: オン
ナビゲーション保持スイッチ: オン
アプローチ保持スイッチ: オフ
ヨーダンパー保持スイッチ: オン
トリム: セット
オートフェザリング スイッチ: ARM
コンディション レバー: ロー アイドル
手動プロペラ フェザリング: チェック
主警報灯: 消灯を確認
マスター コーション ライト: 消灯を確認
滑走路へタキシング
タキシングクリアランス: 要請
航空灯スイッチ: オン
タクシー灯スイッチ: オン
着陸灯スイッチ: 必要に応じてオン
パーキング ブレーキ: 解除
ブレーキ: 走行中に動作確認
水平位置指示器: 走行中に動作確認
水平儀: 走行中に動作確認
旋回滑り計・傾斜計: 走行中に動作確認
滑走路番号表示: 確認
タクシー灯スイッチ: オフ
離陸直前
プロペラ レバー: 前方いっぱい
着陸灯スイッチ: オン
白色閃光灯スイッチ: オン
主警報灯: 消灯を確認
マスター コーション ライト: 消灯を確認
V1 速度: 確認(15,000 lbs時、108 KIAS)
VR 速度: 確認(15,000 lbs時、111 KIAS)
V2 速度: 確認(15,000 lbs時、117 KIAS)
離陸許可: 要請
離陸
先行機: 先行機が離着陸してから数分待機
ブレーキ: ホールド
スラスト レバー: 前方いっぱい
ブレーキ: トルク計が60%を超えたら解除
VR: 10~15度機首上げ
上昇開始後: ブレーキを軽くホールド
着陸装置レバー: アップ
着陸装置位置表示灯: 消灯を確認
対気速度計: 障害物をクリアするまでV2を維持
主警報灯: 消灯を確認
マスター コーション ライト: 消灯を確認
エンジン計器: チェック
上昇
プロペラ同調スイッチ: オン
オートフェザリング スイッチ: ARM
着陸灯スイッチ: オフ
トルク計: 90%以下
プロペラ回転計: 1,600 rpm(油圧不足警告灯が点灯しない程度に下げる)
昇降計: 2,000 ft/min
エンジン計器: 監視
対気速度計: 監視
IFRクリアランス: 未受領なら要請
自動操縦マスタースイッチ: オン(OBS設定コースをインターセプトしたら)
高度計規正ノブ: 2992(FL180に到達したら)
昇降率設定ノブ: 対気速度計が130 KIASを下回らないように調整
巡航
高度計: 巡航高度
昇降計: 0 ft/min
トルク計: 66%
プロペラ回転計: 1,500 rpm
オートフェザリング スイッチ: オフ
巡航中
主警報灯: 消灯を確認
マスター コーション ライト: 消灯を確認
エンジン計器: 監視
燃料計(左右): 監視
高度計: 監視
水平位置指示器: 監視
(目的地まで120nmに接近したら)
気象状況: 確認(ATIS、X Gaugeなど)
燃料バランス: チェック
降下
自動操縦マスター スイッチ: オフ
オートフェザリング スイッチ: ARM
プロペラ回転計: 1,600 rpm
スラスト レバー: アイドル
昇降計: 2,000 ft/min
高度計規正ノブ: 規正値セット(FL180より降下したら)
気象状況: 確認(ATIS、X Gaugeなど)
アプローチ
(着陸滑走路を指定されたら)
NAV 1 周波数: ILSにセット(ILS進入の場合)
音声選択パネル: 必要に応じてセット
OBS: 滑走路に合わせてセット
GPS進入手順: ロード
VREF速度: 確認(100~109 KIAS)
高度計規正ノブ: 規正値セット
オートフェザリング スイッチ: ARM
トルク計: 50~30%
対気速度計: 180 KIAS以下
(ILSを受信、または30nmまで接近したら)
NAV/GPS モード スイッチ: NAV(ILS進入時)
GPS進入手順: アクティベート
着陸灯スイッチ: オン
トルク計: 40~25%
対気速度計: 140 KIAS前後
先行機: 間隔を6nmあけて、先行機の航跡より高度を上げる。必要ならゴーアラウンド
(グライドスロープをインターセプトしたら)
フラップ レバー: アプローチ
着陸装置レバー: ダウン
着陸装置位置表示灯: 点灯を確認
プロペラ レバー: 前方いっぱい
コンディション レバー: ハイ アイドル
トルク計: 30~10%
対気速度計: 120 KIAS前後
昇降計: 300~400 ft/min
着陸
(対地高度 300~500 ftになったら)
フラップ レバー: ダウン
エレベータ トリム: 下から2目盛り
対気速度: VREF
パーキング ブレーキ: 解除を確認
(滑走路端を越えたら)
スラスト レバー: アイドル
昇降計: 100 ft/min
(タッチダウンしたら)
ブレーキ: ホールド
スラスト レバー: 必要に応じてリバース(50 KIASで解除)
給油所・駐機場へタキシング
フラップ レバー: アップ
コンディション レバー: ロー アイドル
トリム: セット
白色閃光灯スイッチ: オフ
タクシー灯スイッチ: オン
エンジン始動スイッチ(左右): オフ
除氷スイッチ: オフ
ピトー ヒート スイッチ: オフ
タキシングクリアランス: 要請
エンジン停止・係留
パーキング ブレーキ: セット
アビオニクス マスター スイッチ: オフ
オートフェザリング スイッチ: オフ
ライト: オフ(計器灯のみ必要に応じてオン)
吸気タービン温度計(左右): 最低温度で安定
コンディション レバー: 燃料カットオフ
プロペラ レバー: フェザー
左右ジェネレータ スイッチ: オフ
バッテリ スイッチ: オフ